myoMOTION事前準備の流れ
前日までにはmyoMOTIONの充電と正常に作動するかを確認しておきます。測定開始時にこれらのミスがあると致命的で測定自体実施困難となってしまいます。必ず事前に確認しておきましょう。
myoMOTIONの各センサーの登録と測定周波数やチャンネルを設定します。一度登録しておけば基本的には変更する必要はありません。
測定する関節角度やオリエンテーションアングル、加速度について設定します。
あとからわかりやすいプロジェクト名と被験者のデータは事前に入力しておきましょう。
具体的に説明していきます。
三次元動作解析装置myoMOTIONとは?
myoMOTIONはIMUの三次元動作解析装置です。現在の新型はUltium Motionと名称変更されています。
IMUなどの動作解析装置の概要は以下の記事をご覧ください!
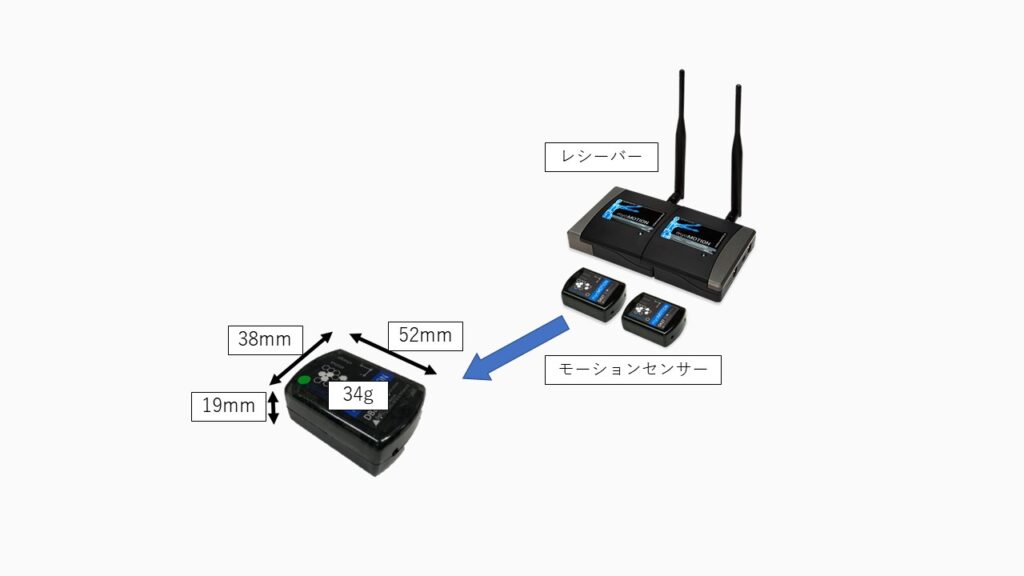
myoMOTIONは三軸のジャイロセンサー、加速度センサー、地磁気センサーが内蔵されたセンサーを使用します。センサーとレシーバー、ノートPCのみで三次元動作解析を行うことができます。センサーには記憶媒体が内蔵されておりレシーバーの受信範囲に関係なく測定可能です。ただし、測定開始時と終了時にはレシーバーの受信範囲内にいる必要があります。センサーはワイヤレスでありセンサーも小型で対象者への干渉がかなり少ないです。
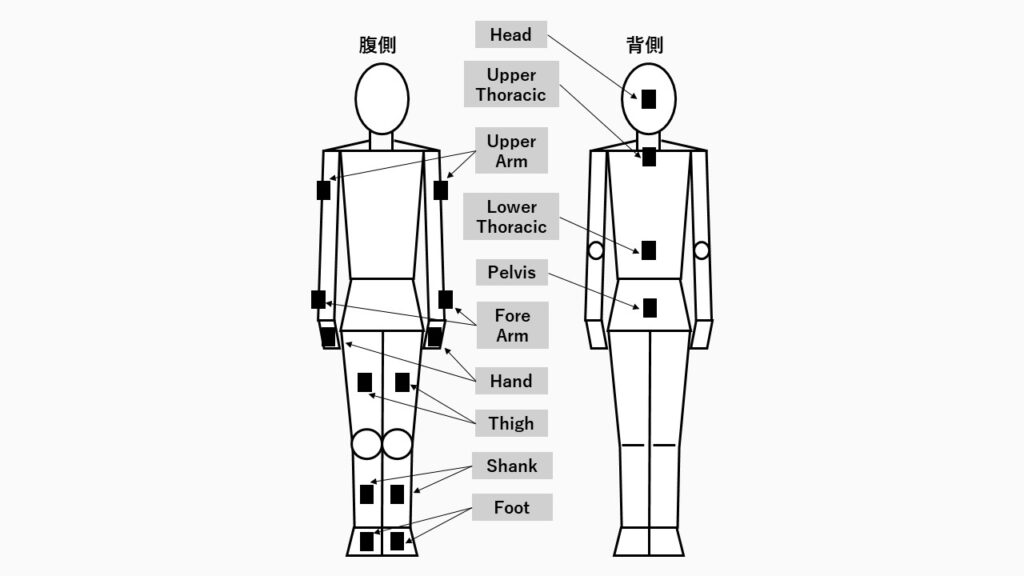
最大16個のセンサーを使うことで全身の主要関節の測定が同時に可能です。各センサーの貼付部位はメーカーで指定されています。各センサーの貼付部位は以下の図の通りです。また、センサーは任意の数に変更することが可能で、Lower Thoracicより下の下半身のみで測定なども可能です。ただし、関節角度を算出するためには関節を構成している最低2つのモーメントにセンサーを貼付する必要があります。
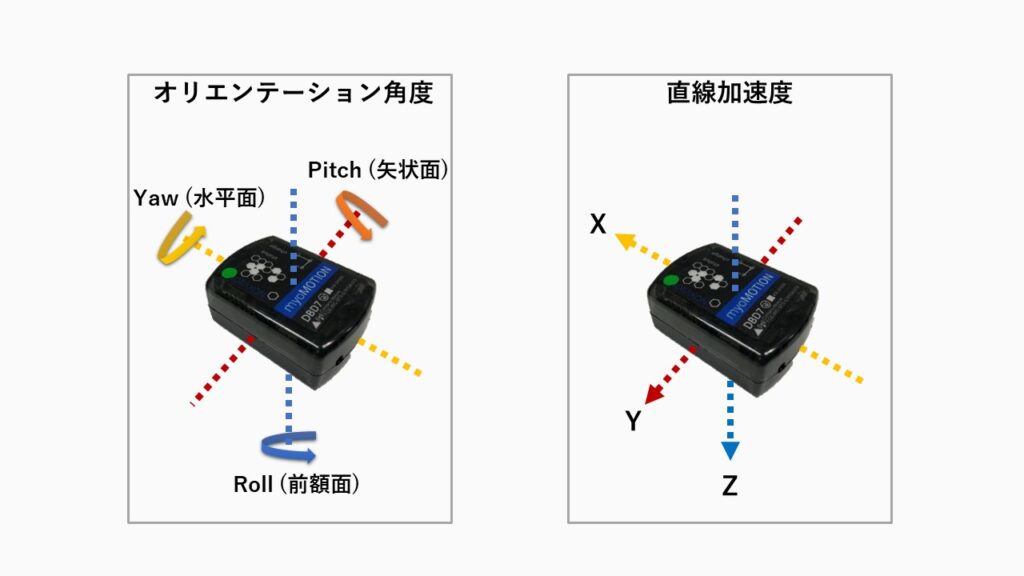
関節角度に加え、各モーメント(大腿・下腿・上腕・前腕・骨盤など)の傾きであるオリエンテーション角度も測定することができます。また、それぞれの三軸加速度も測定されています。また測定データはリアルタイムでの表示も可能です。
myoMOTIONでの測定準備
センサーやPCの充電
事前にセンサーやPCは充電しておきましょう。特に測定中にセンサーの充電の切れてしまうとやり直さなければいけなくなります。また、PCも測定中は動かす必要はないので電源がある環境であれば充電しながらでも可能ですが、可動性を高めるためにも充電しておくに越したことはありません。
センサーの登録
myoMOTIONで測定を始める際にはどのセンサーをどこに貼付するかをあらかじめ設定する必要があります。そのため、測定に何個のセンサーを使ってどこの関節角度・オリエンテーション角度・加速度を測定するかを決めます。
センサーの登録の手順は以下の通りです。
ソフトウェアを立ち上げたあと、センサーを検知させるためにレシーバーをPCにつないでおく必要があります。
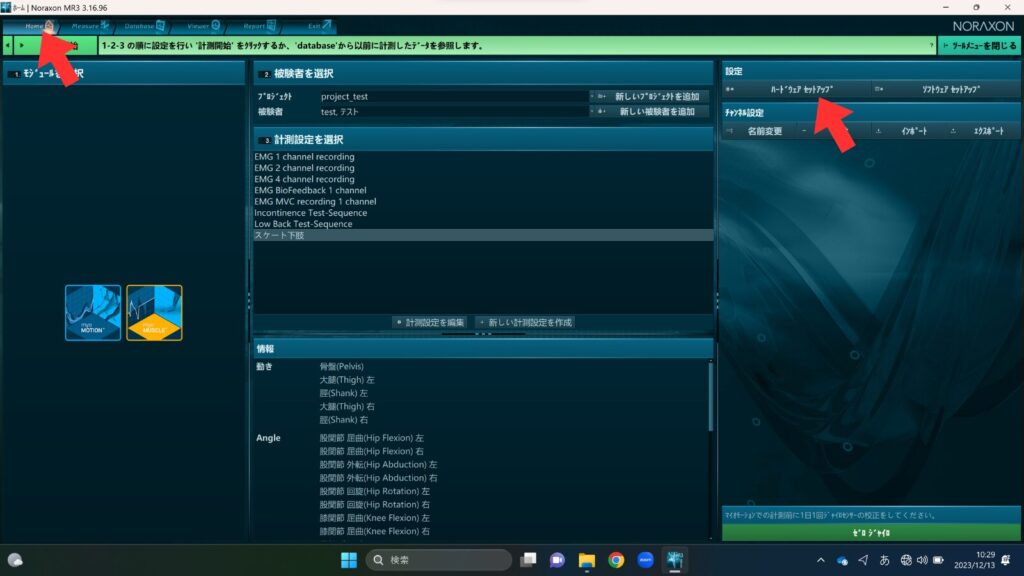
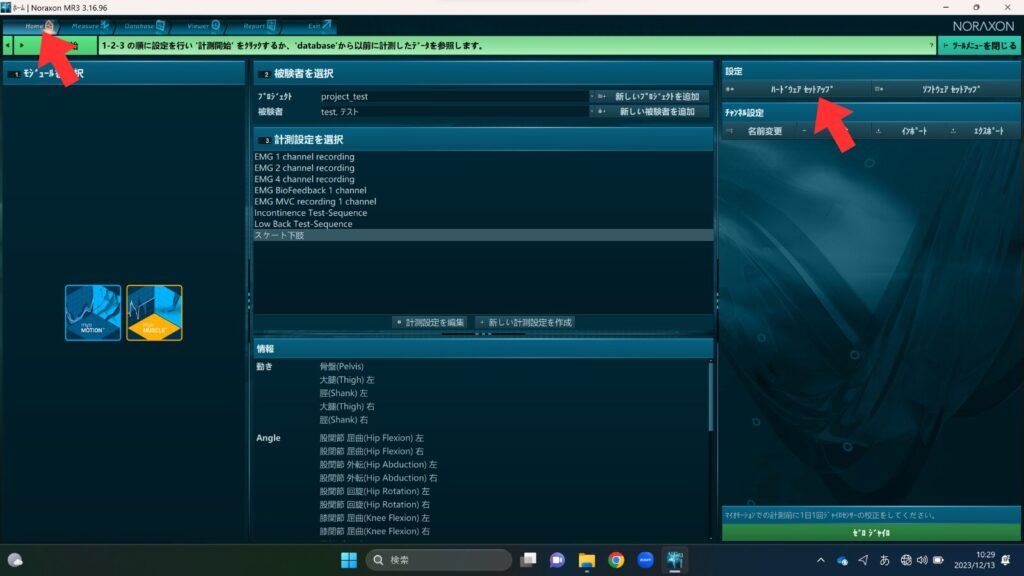
左上のタブの中にある「Home」を選択すると上記の画面になります。画面右側の設定にある「ハードウェアセットアップ」を選択し開きます。
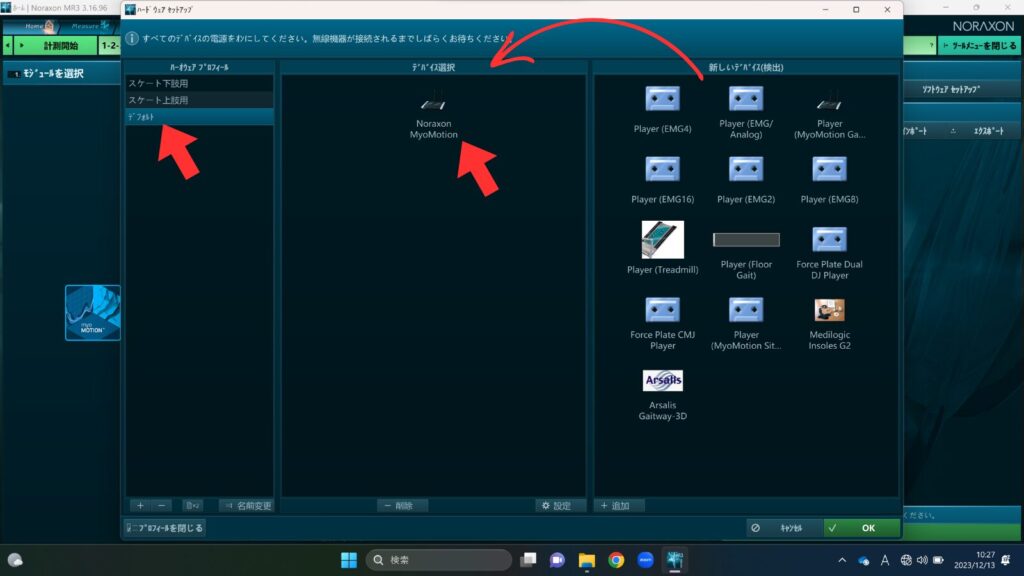
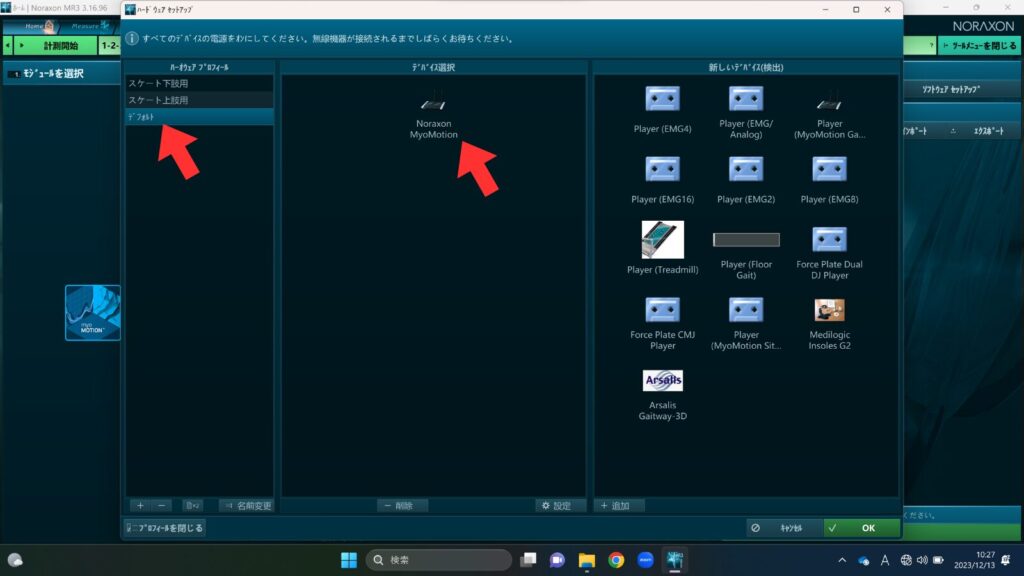
ハードウェアセットアップで、画面左側の「ハードウェアプロフィール」にある編集・確認したものを選びます。最初は「デバイスの選択」は空欄になっていますので、「新しいデバイス(検出)」から、「Noraxon MyoMotion」をドラッグして「デバイスの選択」に追加します。このとき、myoMOTIONのレシーバーを接続しないと、「新しいデバイス(検出)」に出てこないので注意してください。「デバイスの選択」についかされたmyoMOTIONのアイコンをクリックして開きます。
「ハードウェアプロフィール」は複数の設定を保存しておくことができます。下の「+」から新しい設定データを保存することができます。逆に「-」をクリックすると設定の削除になりますのでご注意ください。
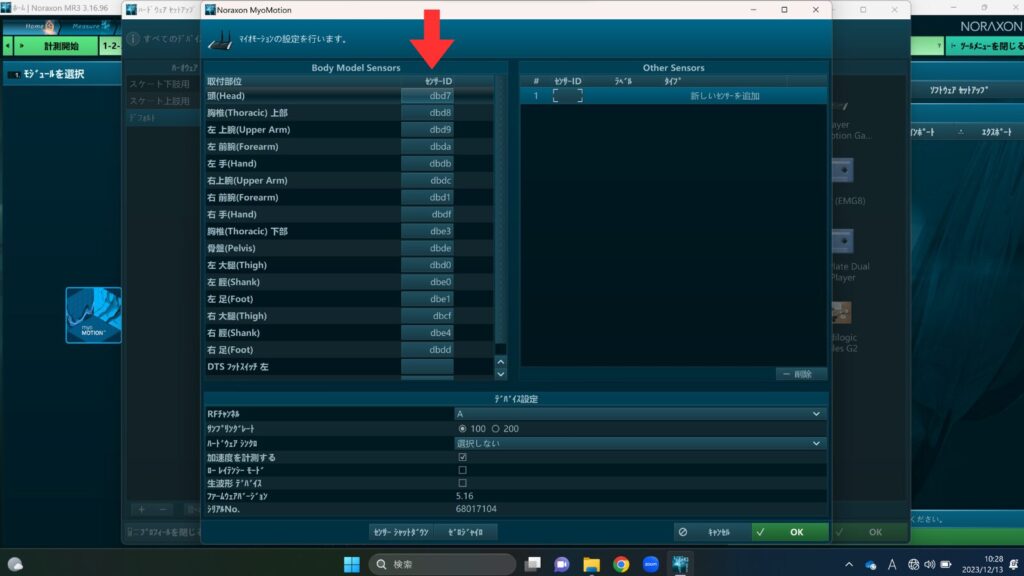
「Body Model Sensors」の「センサーID」にセンサーに記載されているIDを入力していきます。センサーIDは下記の画像の箇所に書いてあります。

基本的にはセンサーのラベルと貼付部位は合わせたほうがセンサーの貼付の際の間違いが少なくなるため理想的です。ただし、8センサーで2セット作りたい、5センサーで3セット作りたいという場合にはセンサーのラベルとセンサーIDを一致させなくても登録可能です。
登録に間違いなことを確認すれば、センサーの登録は終了です。
センサーのゼロジャイロ処理
myoMOTIONにはゼロジャイロという処理があります。簡単に言えばセンサーのジャイロや加速度計のリセットのようなものです。測定前には1度行っておくと良いでしょう。
手順は以下の通りです。
ゼロジャイロは選択している「ハードウェアプロフィール」でセンサーIDが登録されているセンサーだけに実行されます。そのため、使用する「ハードウェアプロフィール」を選択するようにしてください。
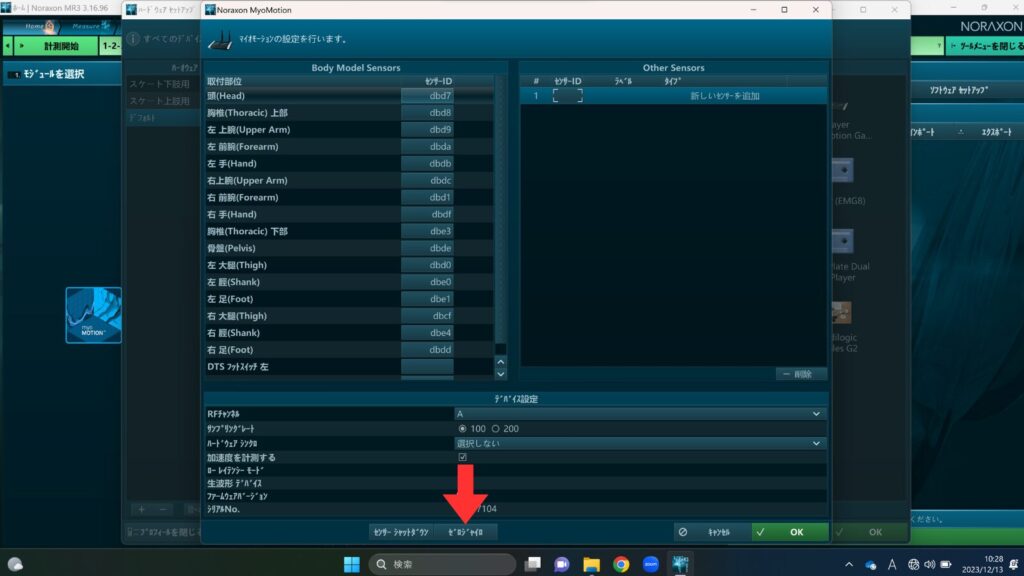
「ゼロジャイロ」を選択すると、センサーを平らな場所に置くように指示がでます。必ず、センサーが平らな場所においてあることを確認してから実行しましょう。
対象者の基本情報の収集
測定前に被験者の基本情報を聴取できるのであればあらかじめ準備しておくと測定がよりスムーズになります。特に氏名、性別、身長、体重があれば被験者データはあらかじめ入力しておくことができます。入力方法はソフトウェアの設定で後述します。
myoMOTIONのハードウェア設定
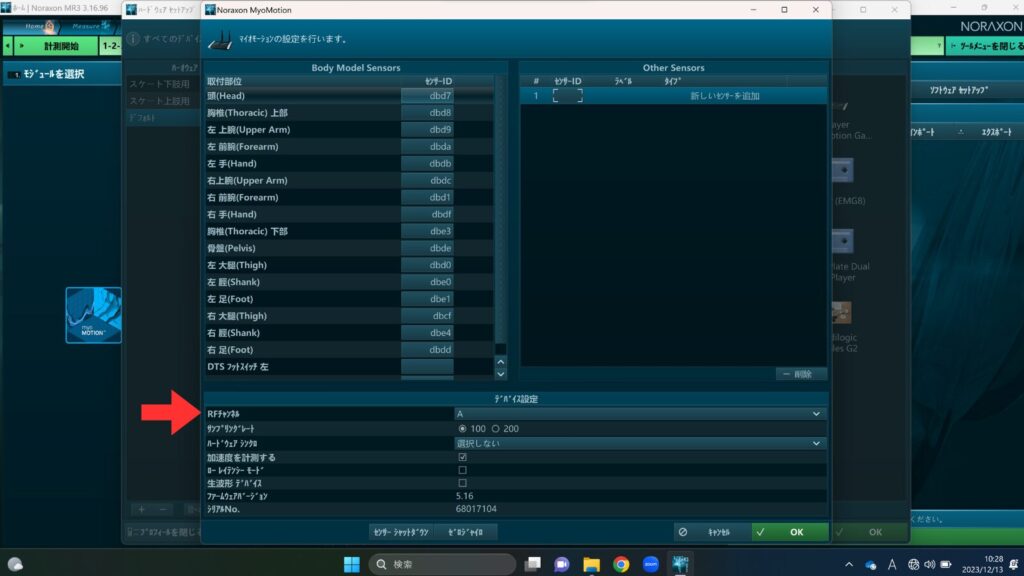
myoMOTIONの測定周波数設定
「ハードウェアセットアップ」から「ハードウェアプロフィール」を選択し「Noraxon MyoMotion」を開きます。「サンプリングレート」から測定周波数を100Hzまたは200Hzから選択します。より精密なデータが欲しい場合には200Hzを選択しましょう。ただし、myoMOTIONの場合は200Hzでは最大8センサーまでになります。下半身のみや上半身のみなど限定しての測定であれば200Hzで設定しておけば良いと思います。
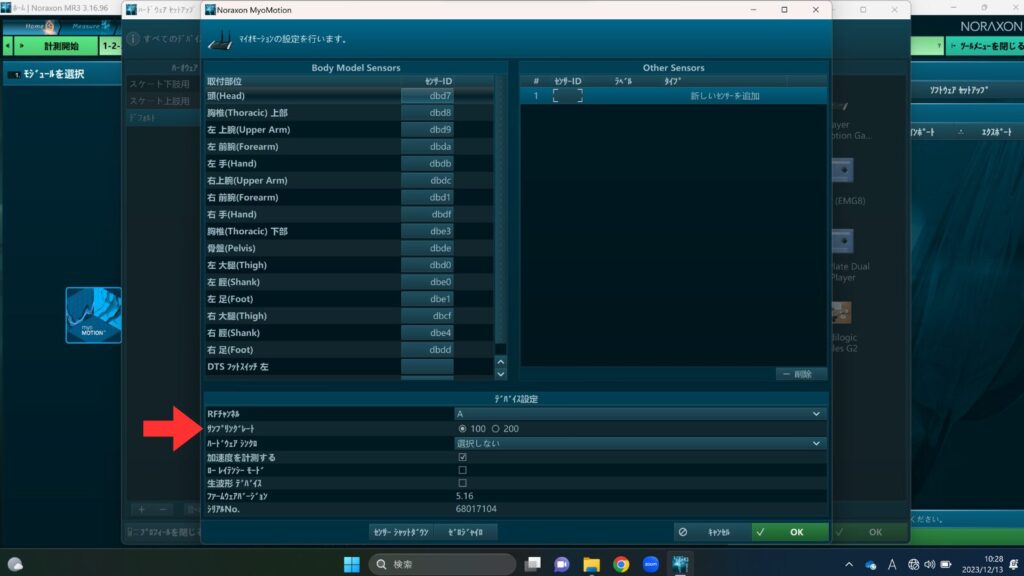
myoMOTIONのチャンネル設定
チャンネルの設定はレシーバー1台で測定している場合にはどれを選択していても問題ないのでデフォルトのままで大丈夫かと思います。ただし、レシーバーを複数台使用し同時測定する際には必ずチャンネルが被らないように変更してください。
その他機器の接続同期が必要な場合
NORAXONには三次元動作解析装置であるmyoMOTION (Ultium Motion)をはじめ、筋電や圧センサー、足圧センサーなどのプローブを接続するするこで様々なデータを測定できるUltiumがあります。それぞれの機器は1つの統一されているソフトウェアで測定することができます。また、マイオシンクロという同期システムを使用することで、アナログ信号も用いて様々な機器と同期し測定することができます。各機器の登録もハードウェア設定でしておく必要がありますが長くなるので別の機会で解説したいと思います。
myoMOTIONのソフトウェア設定
使用するセンサーの計測設定
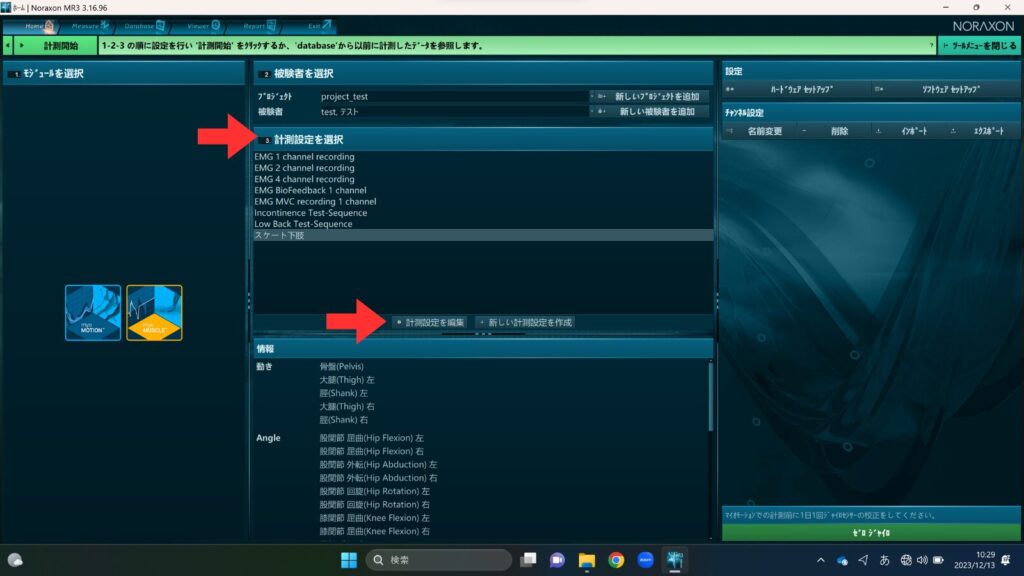
「Home」タブの「計測設定を選択」の欄から使用する設定を選択します。新規で設定を作成する場合には「新しい計測設定を作成」から追加します。既存の設定を確認、編集する場合には「計測設定を編集」を選択します。
既存の設定の場合には「ユーザーのデバイス設定」にmyoMOTIONが追加されていると思いますが新規で設定を作る場合には空欄になっていると思います。その場合には、右欄の「利用できるデバイス」から「Noraxon MyoMotion」を「ユーザーのデバイス設定」にドラッグして追加します。
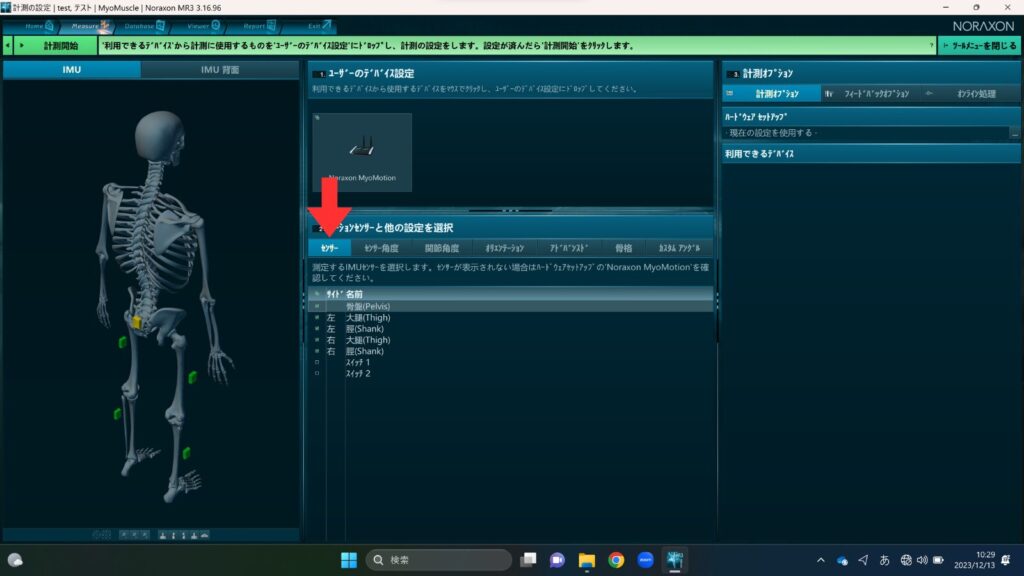
追加すると「モーションセンサーと他の設定を選択」という項目が表示されます。その中の「センサー」タブから使用するセンサーを選択します。この時、表示されるセンサーは現在選択している「ハードウェアプロフィール」から参照されます。使用する予定のセンサーにすべて☑がついているか確認してください。もしセンサーを追加したい場合には「ハードウェアプロフィール」から修正してください。
測定する関節角度・オリエンテーションアングルの選択
センサーを選択したら、次に測定したいデータを選択します。「モーションセンサーと他の設定を選択」から「センサー角度」「関節角度」「オリエンテーション」タブからそれぞれ使用したいデータに☑をつけていきます。基本的にはすべてに☑をつけておいて問題ないかと思います。特に「オリエンテーション」は初期設定ではオフになっていますので注意してください。
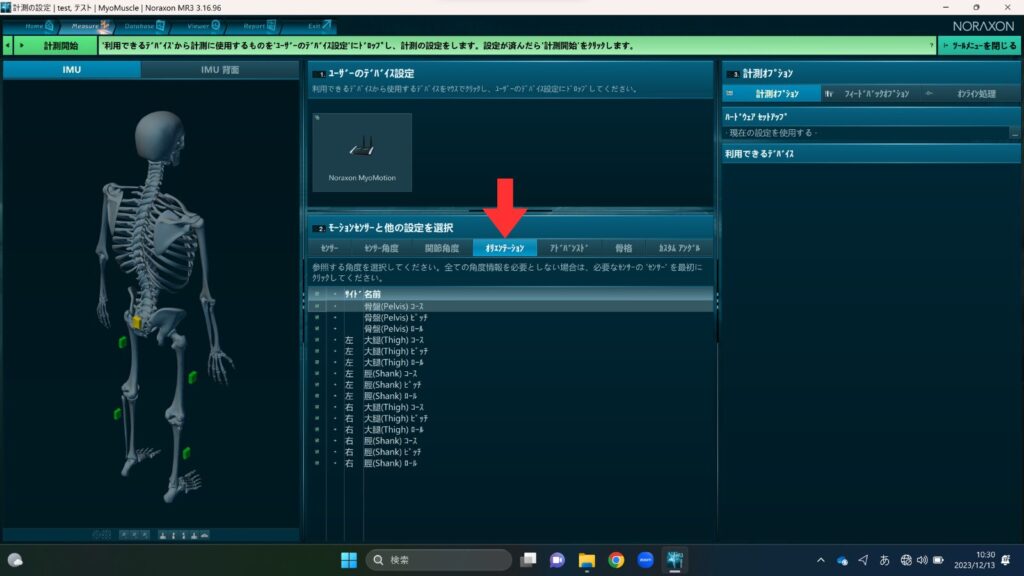
それぞれのデータの見方や特徴についてはデータの見方の記事をご覧ください。
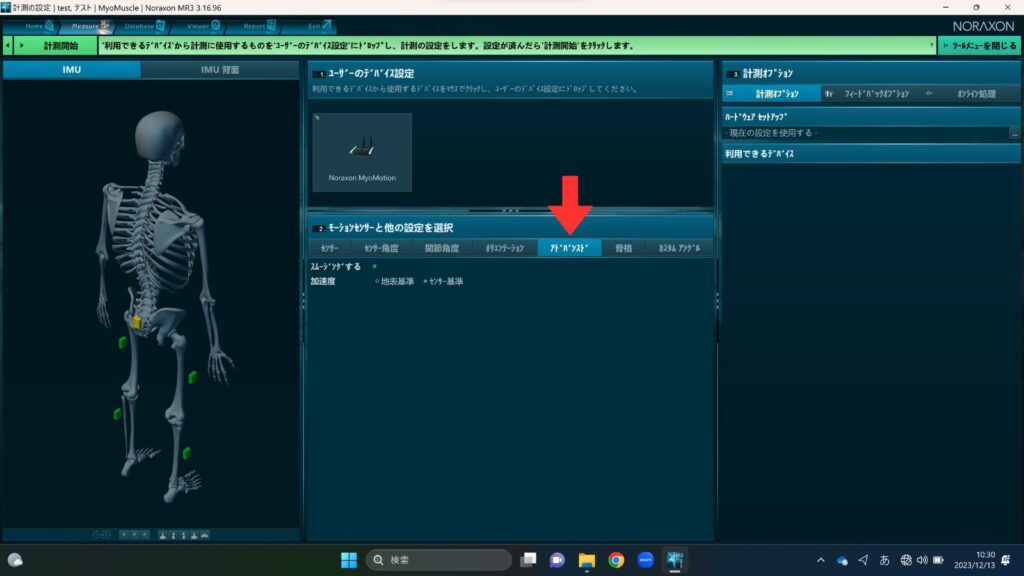
加速度の表示する種類の設定
「アドバンスド」タブから加速度の基準を設定する項目があります。2つの基準があり、センサー基準と地表基準になります。それぞれの簡単な説明は以下の通りです。
- センサー基準:センサーの傾きに関係なくセンサーそのものの3軸をそのまま測定する。そのため、センサーの傾きが変わるごとに加速度の三軸の方向も変わる。
- 地表基準:キャリブレーションの姿勢から三軸の方向が決まる
これはソフトウェア上で見る加速度データを選ぶものであり内部的には2つの基準に対してのデータが同時に測定されています。また、スムージングはデフォルトでチェックされていますのでそのままでよいでしょう。
骨格とカスタムアングル
骨格とカスタムアングルは基本的にはそのままで大丈夫かと思います。骨格は後述する被験者データ身長を入力すると自動で計算されます。
カスタムアングルはセンサーの組み合わせを自ら設定し角度を算出するものです。もし特別な角度を算出したい場合には設定する必要があります。
プロジェクトと被験者のデータ準備
プロジェクトの作成・選択
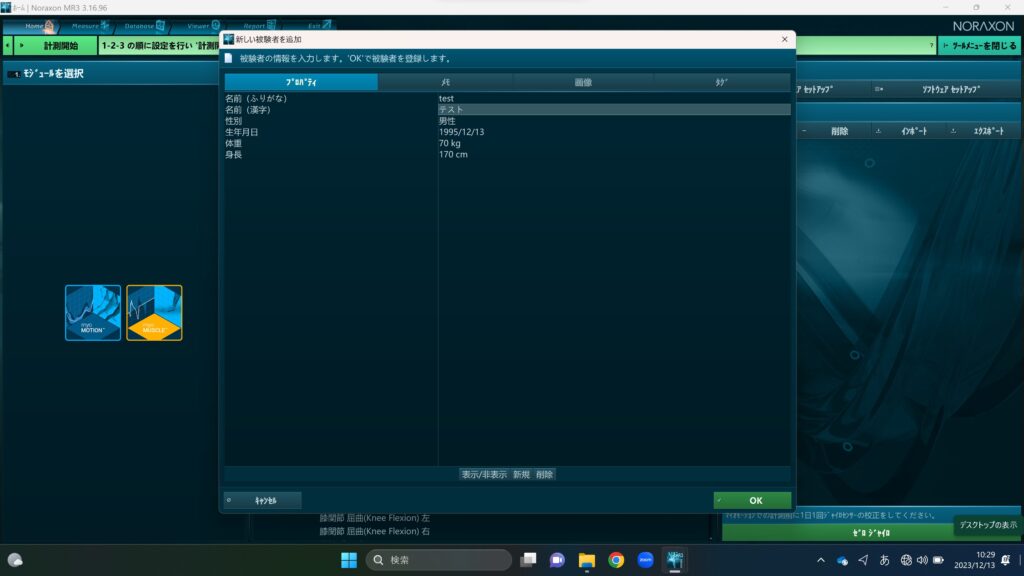
測定するデータのプロジェクトを作成しましょう。パソコンのフォルダのようなものでこのプロジェクトの中に被験者のリストを作成していきます。「Home」タブにある「被験者の選択」から「プロジェクト」を選択します。既存の物を選択するか、「新しいプロジェクトを追加」から新規で作成します。
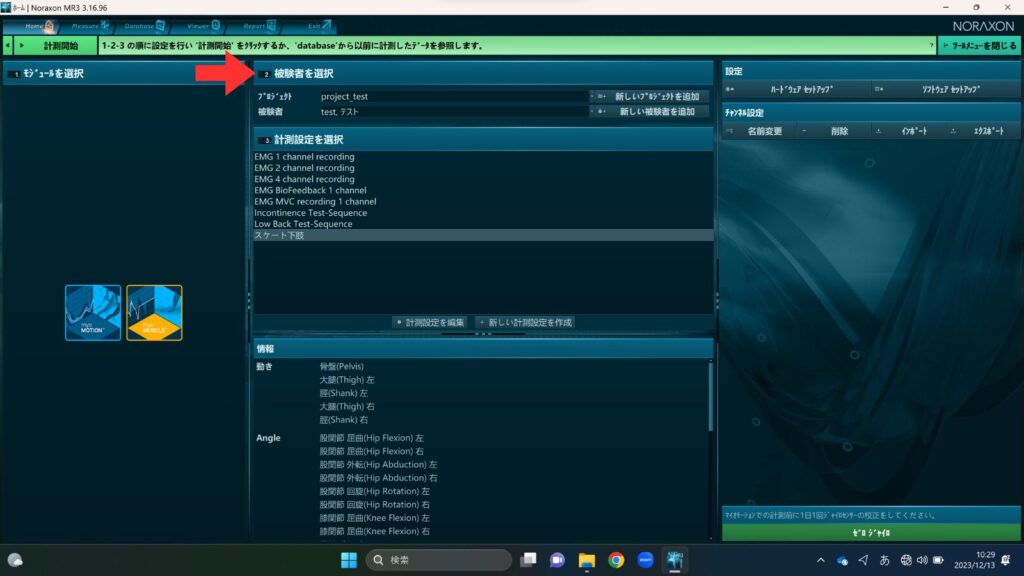
プロジェクトを作成したら、被験者を登録していきます。このときに事前に聴取した基本情報があると事前に作成することができます。また、この時、身長は正確に入力してください。身長から各体節の長さを推測しているため注意してください。実際の測定では被験者を選択することで被験者ごとにデータが保存されていきます。全項目を入力しなくても、「名前」「性別」「身長」が入力されていれば測定自体は可能です。
測定へ進む
ここまでの事前準備ができれば実際の測定に進んでいきます。測定の必要な手順や流れについては以下の記事に進んでください。



コメント